Autonomous Maze-Solving Tennis Ball-Collecting Robot
The goal of this project was to design and build a robot that would autonomously navigate a maze while collecting tennis balls along the way.
Our robot collected all five tennis balls and exited the maze in one minute and 7 seconds winning best in class.
All sensing was done with 3 IR sensors, the motion was driven by 2 continuous rotation servos, it was powered by 2 7.2 volt batteries wired in series and regulated down to 12v to continuously drive the motor and stepped down to 5 volts to power the Arduino, servos and sensors.
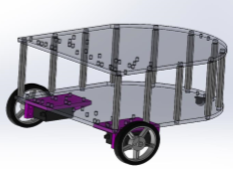
Robot Body

The Robot
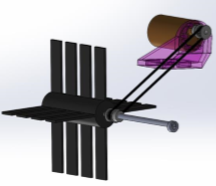
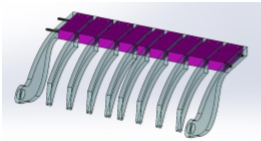
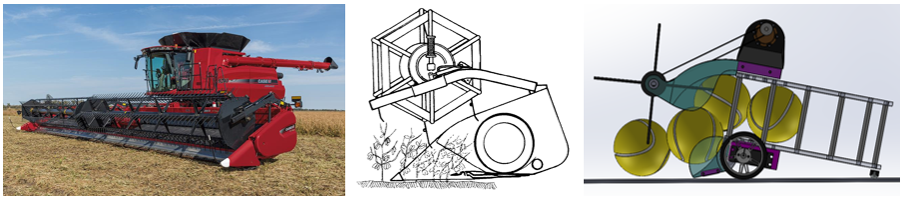
Paddle-Wheel Drive Mechanism
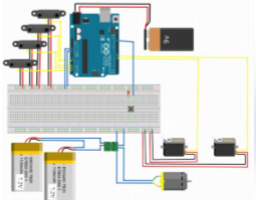
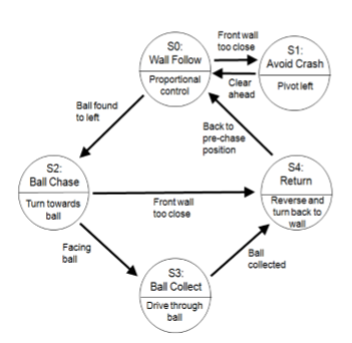
Component Diagram
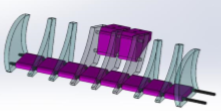
Ramp Assembly