Deterministic Dynamic Programming Shortest Path Planning
This was a deterministic dynamic programming application project for my optimal control class
Topological data for Mount Everest and the Grand Canyon was used to find the shortest path between two points. For Mount Everest the goal was to get to the peak. For the Grand Canyon the goal was to find the shortest path to traverse the canyon.
Using DDP in this application requires 2.28*〖10〗^33 calculations where exhaustive search would require 2.6*〖10〗^95 calculations
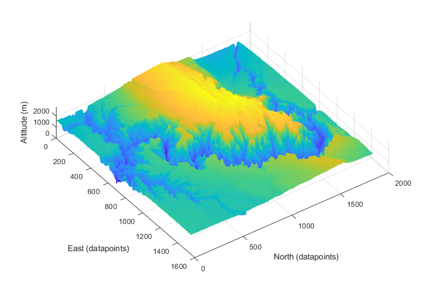
Grand Canyon topological data imported into MatLab.
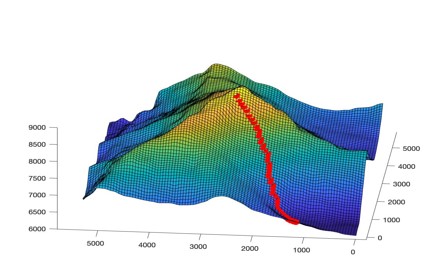
Birdseye view of shortest path to the peak of Mt. Everest.
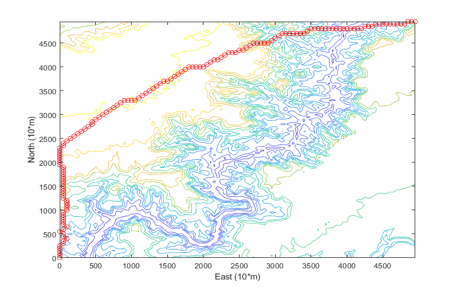
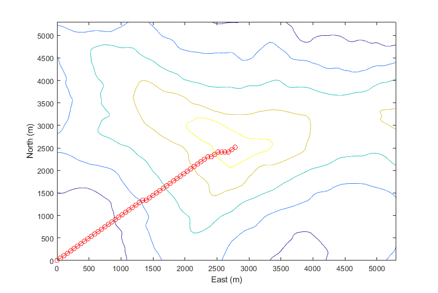
Birdseye view of shortest path to traverse the Grand Canyon