

Modular Undulatory Robotic Fish
The MUBot is a research platform designed to investigate the modeling of fluid/body interactions and hydrodynamics as well as to test control strategies such as CPGs and motion primitives in bioinspired robotic systems.
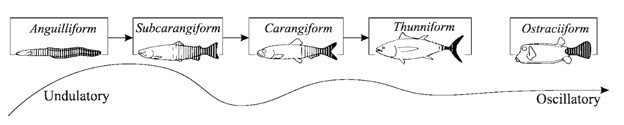
This robot was designed with moudlarity in mind so that the body mophologies of various body/caudal fin fish species could be easily mimiced.
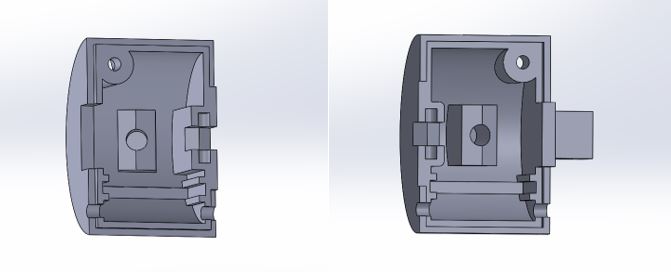
Actuator Housing Render
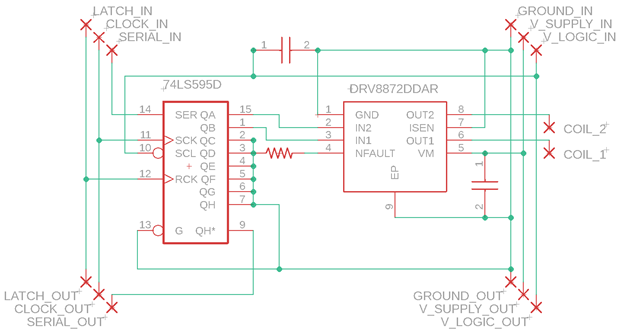
PCB Circuit Schematic

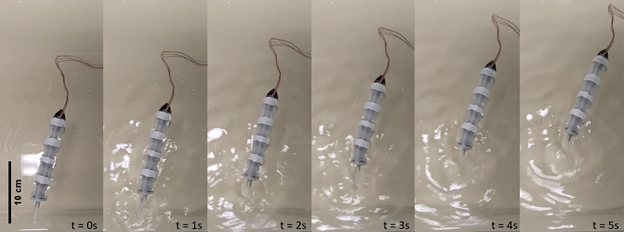
The Robot
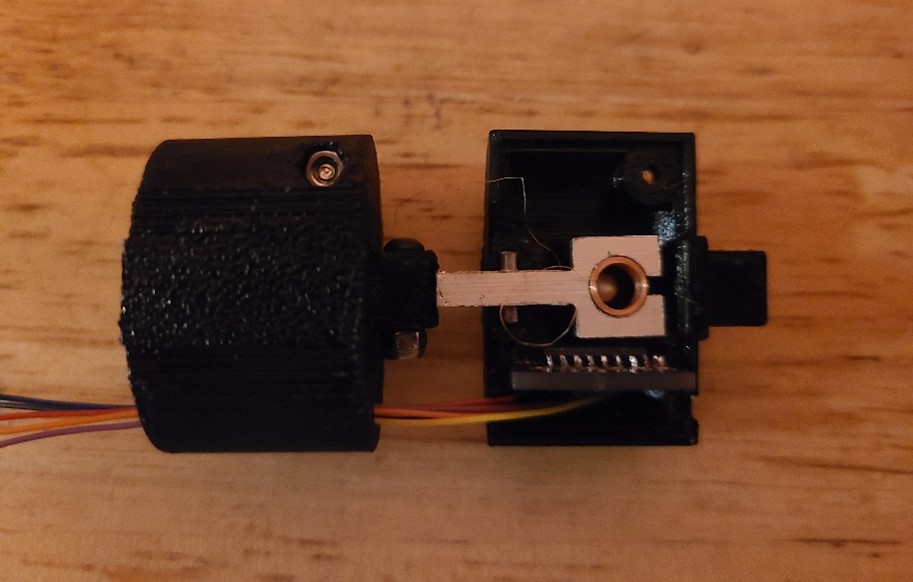
Actuator Assembly
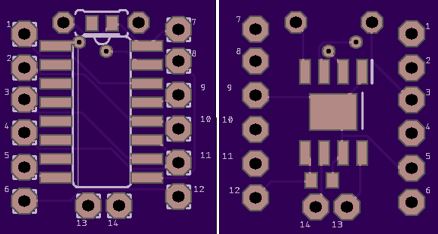
PCB Render
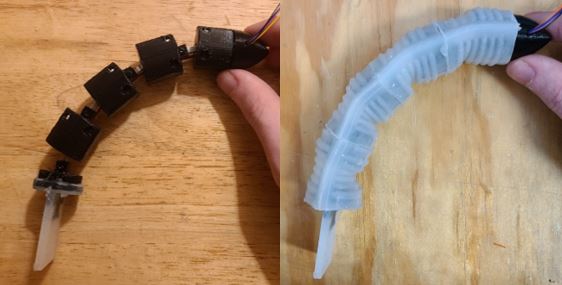
Top View Full Range of Motion
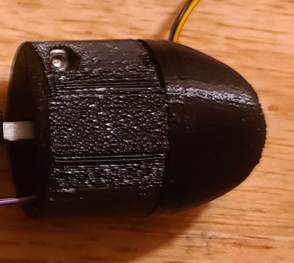
Head Segment
PCB
If you are really interested in this project you can watch my full thesis defense below.
If you are really really interested in this project you can access my full thesis at Penn State's electronic thesis website.